実習内容
概要
LED-Campは、組込みシステム開発の初学者や未経験者、組込みシステムに興味のある方を対象とした、合宿形式の教育実習プログラムです。
マイコンとモータを用いた実習教材とそのシミュレータを使用して制御プログラムを開発します。また、開発にはUMLを用いたモデル駆動開発やアジャイル開発手法を用い、それらの有用性を体験します。教育実習は初対面の参加者から構成されるチームで行います。LED-Campでは、このようなチームで重要となるコミュニケーション技術についても学びます。
教育目標
LED-Campでは以下のような教育目標を掲げています。
教育目標は、LED-Campの実行委員が参加者の皆さんに伝えたいこと、学んでほしいことを掲げたものです。
① 組込みシステムの開発技術を習得する
a) UMLを用いたモデル駆動開発
b) アジャイル開発手法(スクラムフレームワーク)
昨今のソフトウェアは大規模化し、要求の変化が頻繁に発生します。そのような中でモデル駆動開発やアジャイル開発は強力なツールになります。これらの開発技術を実際に体験しながら学びましょう。
② チーム開発を円滑にするコミュニケーション技術を習得する
a) メンバーの考えを引き出す話し方・聴き方
b) 目標に向けた合意形成
c) チームの状況を適切に把握するふりかえり
チームとは「同じ目標を達成するため」のものと考えています。チームがパフォーマンスを発揮するためにはメンバー全員が「同じ目標」に納得している必要があります。また、開発中にチームの状況が、目標に対して正しく進んでいるかを把握している必要もあります。これらを満たすためには、メンバーに意見を伝える/意見を聴きだすことが欠かせません。
LED-Campではチームの立ち上げから開発、ふりかえりまでを行います。それぞれの場面で必要となるコミュニケーション技術を実践を通じて身につけていきます。
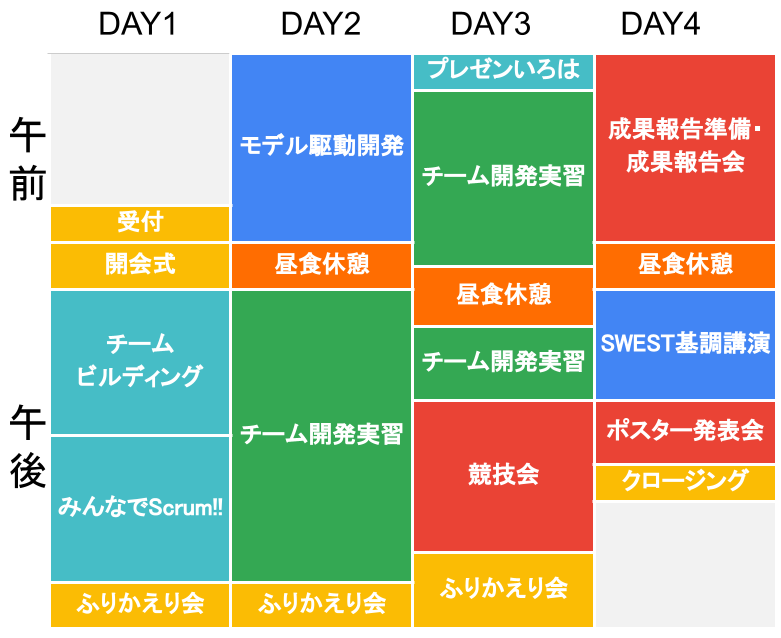
実習スケジュール
※以下のスケジュールは概要です。申込後に詳細なスケジュールを配布します。
実習教材
LED-Tank
今年もRaspberry Pi3を搭載したタンク型教材”LED-Tank”を実習筐体として使用します。左右のキャタピラを制御することで、前後左右に動き回ります。また、距離センサやカラーセンサーが各所に搭載されており、周りの環境情報を取得して制御に反映することができます。
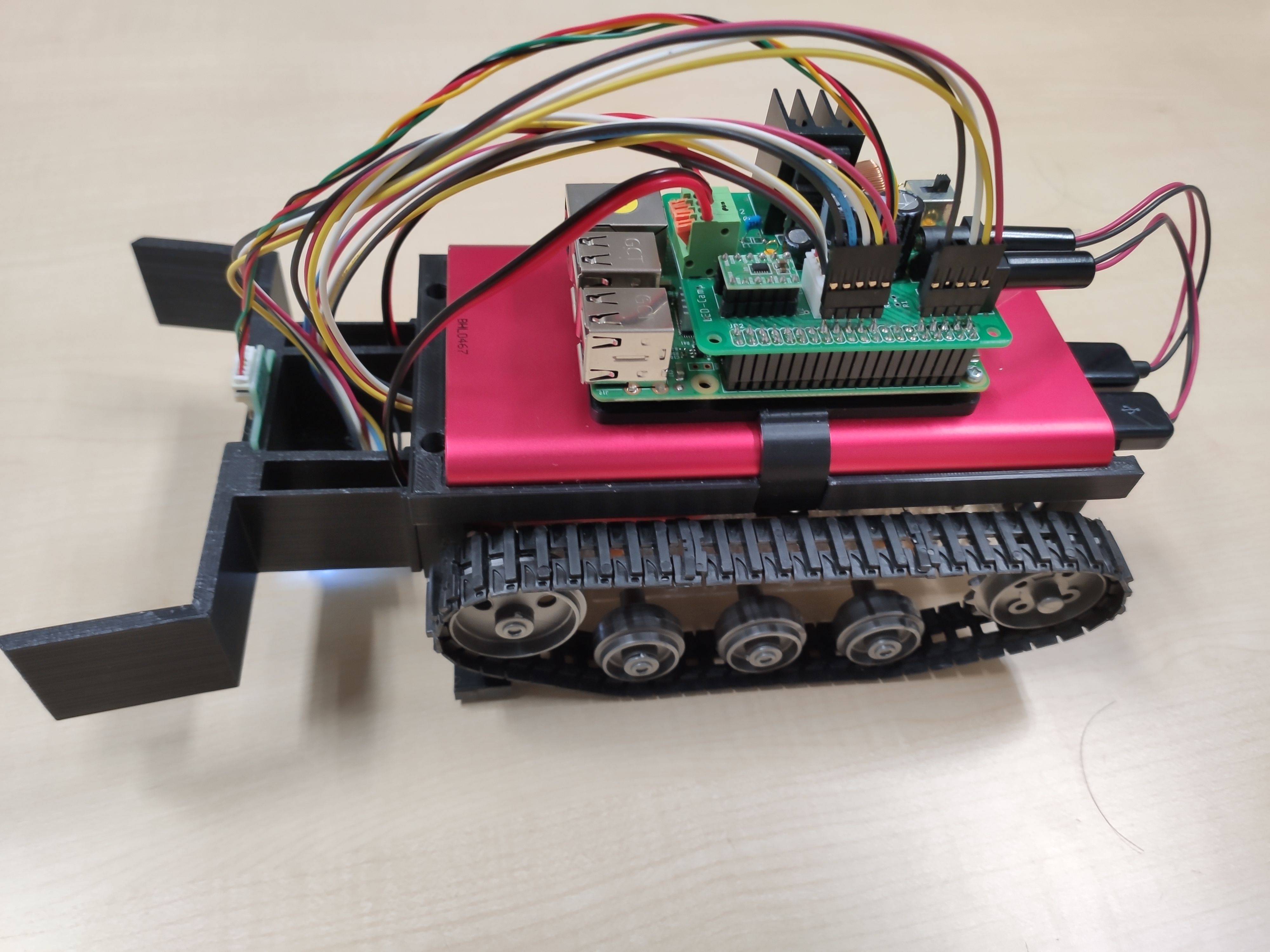
Raspberry Pi 3
シミュレータ:Webots + LED-Tank 3Dモデル
ロボットシミュレータWebotsとLED-Campオリジナルのタンク型教材LED-Tankの3Dモデルを使用します。LED-Tankの実機と同様にキャタピラで動き回ることができ、センサも同様に搭載されています。

astah* professional
制御ソフトウェアの設計には、ソフトウェアのモデリングツールであるastah* professionalを使用します。astah*を使用することで、ソフトウェアの構造や振る舞いを、UMLモデルを用いてモデリングすることができます。モデル駆動開発(MDD)におけるUMLモデルからのソースコードの生成は、LED-Camp実行委員会で開発しているastah* professionalのMDDプラグインを使用します。
実習で使用するastah* professionalのライセンスは、(株)チェンジビジョンより提供されています。